Des chercheurs ont conçu une main robotique peu coûteuse et économe en énergie, capable de saisir toute une série d’objets – et de ne pas les laisser tomber – en utilisant uniquement le mouvement de son poignet et la sensation de sa « peau ».
Saisir des objets de tailles, de formes et de textures différentes est un problème facile pour un être humain, mais difficile pour un robot. Des chercheurs de l’université de Cambridge ont conçu une main robotique souple, imprimée en 3D, qui ne peut pas bouger ses doigts de manière autonome, mais qui peut tout de même effectuer une série de mouvements complexes.
La main robotique a été entraînée à saisir différents objets et a pu prédire si elle allait les faire tomber en utilisant les informations fournies par les capteurs placés sur sa « peau ».
Ce type de mouvement passif rend le robot beaucoup plus facile à contrôler et beaucoup plus économe en énergie que les robots dotés de doigts entièrement motorisés. Les chercheurs affirment que leur conception adaptable pourrait être utilisée pour le développement de robots bon marché capables de mouvements plus naturels et d’apprendre à saisir une large gamme d’objets. Les résultats sont publiés dans la revue Advanced Intelligent Systems.
Dans le monde naturel, le mouvement résulte de l’interaction entre le cerveau et le corps : cela permet aux personnes et aux animaux de se déplacer de manière complexe sans dépenser inutilement de l’énergie. Au cours des dernières années, les composants souples ont commencé à être intégrés dans la conception robotique grâce aux progrès des techniques d’impression 3D, qui ont permis aux chercheurs d’ajouter de la complexité à des systèmes simples et efficaces sur le plan énergétique.
La main humaine est extrêmement complexe, et recréer toute sa dextérité et sa capacité d’adaptation dans un robot représente un défi de recherche considérable. La plupart des robots avancés d’aujourd’hui ne sont pas capables d’effectuer des tâches de manipulation que de jeunes enfants peuvent réaliser avec aisance. Par exemple, les humains savent instinctivement quelle force utiliser pour ramasser un œuf, mais pour un robot, c’est un défi : trop de force, et l’œuf risque de se briser ; trop peu, et le robot risque de le faire tomber. En outre, une main robotisée entièrement actionnée, avec des moteurs pour chaque articulation de chaque doigt, nécessite une quantité importante d’énergie.
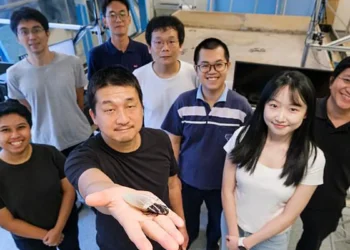
Dans le laboratoire de robotique bio-inspirée du professeur Fumiya Iida, au sein du département d’ingénierie de Cambridge, les chercheurs ont mis au point des solutions potentielles à ces deux problèmes : une main de robot capable de saisir une variété d’objets avec la bonne pression tout en utilisant une quantité minimale d’énergie.
« Lors d’expériences antérieures, notre laboratoire a montré qu’il était possible d’obtenir une gamme significative de mouvements dans une main de robot en bougeant simplement le poignet« , explique le Dr Thomas George-Thuruthel, co-auteur de l’étude et actuellement basé à l’University College London (UCL) East. « Nous voulions voir si une main de robot basée sur des mouvements passifs pouvait non seulement saisir des objets, mais aussi être capable de prédire si elle allait laisser tomber les objets ou non, et de s’adapter en conséquence. »
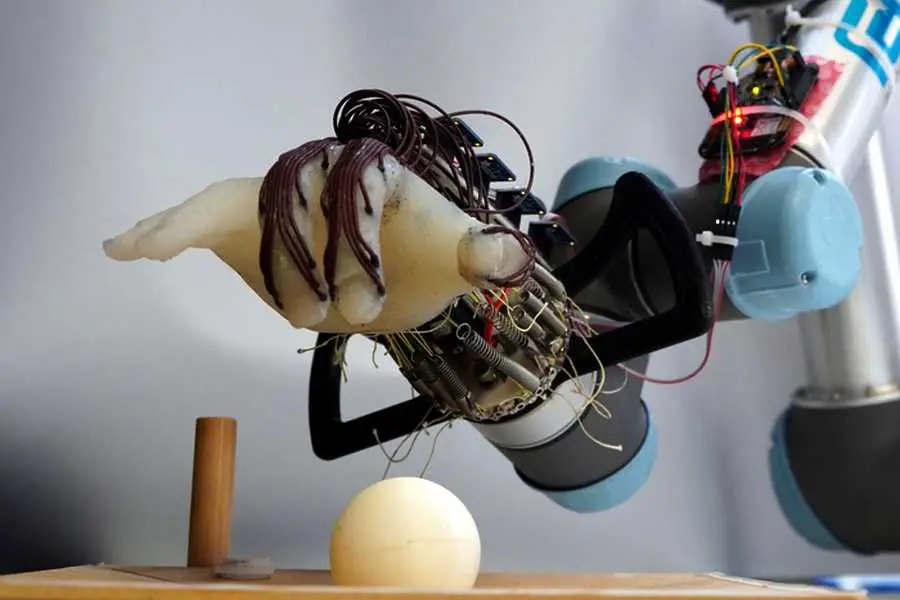
Les chercheurs ont utilisé une main anthropomorphe imprimée en 3D et équipée de capteurs tactiles, afin que la main puisse sentir ce qu’elle touche. La main n’était capable que de mouvements passifs, au niveau du poignet.

L’équipe a effectué plus de 1 200 tests avec la main robotisée, observant sa capacité à saisir de petits objets sans les faire tomber. Le robot a d’abord été entraîné à l’aide de petites balles en plastique imprimées en 3D, qu’il a saisies en utilisant une action prédéfinie obtenue grâce à des démonstrations humaines.
« Ce type de main a un peu de ressort : elle peut saisir des objets par elle-même sans actionner les doigts« , a déclaré le premier auteur, le Dr Kieran Gilday, qui travaille actuellement à l’EPFL à Lausanne, en Suisse. « Les capteurs tactiles donnent au robot une idée de la qualité de la prise, de sorte qu’il sait quand il commence à glisser. Cela l’aide à prévoir les défaillances. »
Le robot a procédé par essais et erreurs pour apprendre quel type de prise serait efficace. Après avoir terminé l’entraînement avec les balles, il a tenté de saisir différents objets, notamment une pêche, une souris d’ordinateur et un rouleau de papier bulle. Lors de ces tests, la main a réussi à saisir 11 objets sur 14.
« Les capteurs, qui sont en quelque sorte la peau du robot, mesurent la pression exercée sur l’objet« , explique Mme George-Thuruthel. « Nous ne pouvons pas dire exactement quelles informations le robot reçoit, mais il peut théoriquement estimer où l’objet a été saisi et avec quelle force.
« Le robot apprend que la combinaison d’un mouvement particulier et d’un ensemble particulier de données de capteurs conduira à l’échec, ce qui en fait une solution personnalisable« , a déclaré M. Gilday. « La main est très simple, mais elle peut saisir un grand nombre d’objets avec la même stratégie.«
« Le grand avantage de cette conception est la gamme de mouvements que nous pouvons obtenir sans utiliser d’actionneurs« , a déclaré Iida. « Nous voulons simplifier la main autant que possible. Nous pouvons obtenir beaucoup d’informations utiles et un haut degré de contrôle sans aucun actionneur, de sorte que lorsque nous les ajouterons, nous obtiendrons un comportement plus complexe dans un ensemble plus efficace« .
Une main robotique entièrement actionnée, outre la quantité d’énergie qu’elle requiert, pose également un problème de contrôle complexe. La conception passive de la main conçue à Cambridge, qui utilise un petit nombre de capteurs, est plus facile à contrôler, offre une large gamme de mouvements et rationalise le processus d’apprentissage.
À l’avenir, le système pourrait être étendu de plusieurs façons, par exemple en ajoutant des capacités de vision par ordinateur ou en apprenant au robot à exploiter son environnement, ce qui lui permettrait de saisir une plus grande variété d’objets.
Ce travail a été financé par UK Research and Innovation (UKRI) et Arm Ltd. Fumiya Iida est membre du Corpus Christi College de Cambridge.
Crédit image / University of Cambridge
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.