Un robot miniature, inspiré par l’incroyable capacité de préhension des geckos et l’efficacité de la locomotion des chenilles, pourrait un jour aider les médecins à réaliser des interventions chirurgicales. Ce robot, développé par des ingénieurs américains, est le premier de son genre à ne pas nécessiter de connexion à une source d’énergie externe. Cette caractéristique permet une utilisation à distance et une grande polyvalence pour des applications potentielles telles que l’assistance aux chirurgiens et la recherche dans des endroits autrement inaccessibles.
Le GeiwBot, comme l’ont baptisé les chercheurs de l’Université de Waterloo, est un robot construit à partir d’un matériau intelligent. Il peut être modifié au niveau moléculaire pour imiter la façon dont les geckos collent et décollent de puissants préhenseurs sur leurs pieds. Cela permet au robot, d’environ quatre centimètres de long, trois millimètres de large et un millimètre d’épaisseur, de grimper sur un mur vertical et de traverser le plafond sans être relié à une source d’énergie.
Le micro-robot utilise la lumière ultraviolette (UV) et la force magnétique pour se déplacer sur n’importe quelle surface, même sur les murs et à travers les plafonds. Il a été construit à l’aide d’élastomères à cristaux liquides et de tampons adhésifs synthétiques. Une bande de polymère sensible à la lumière simule le mouvement d’arc et d’étirement d’une chenille, tandis que des tampons magnétiques inspirés du gecko à chaque extrémité assurent la préhension.
Des applications potentielles dans la chirurgie et au-delà
Un robot doux non relié ouvre la voie à des applications chirurgicales potentielles via une opération à distance à l’intérieur du corps humain et pour la détection ou la recherche dans des endroits dangereux ou difficiles d’accès lors d’opérations de sauvetage.
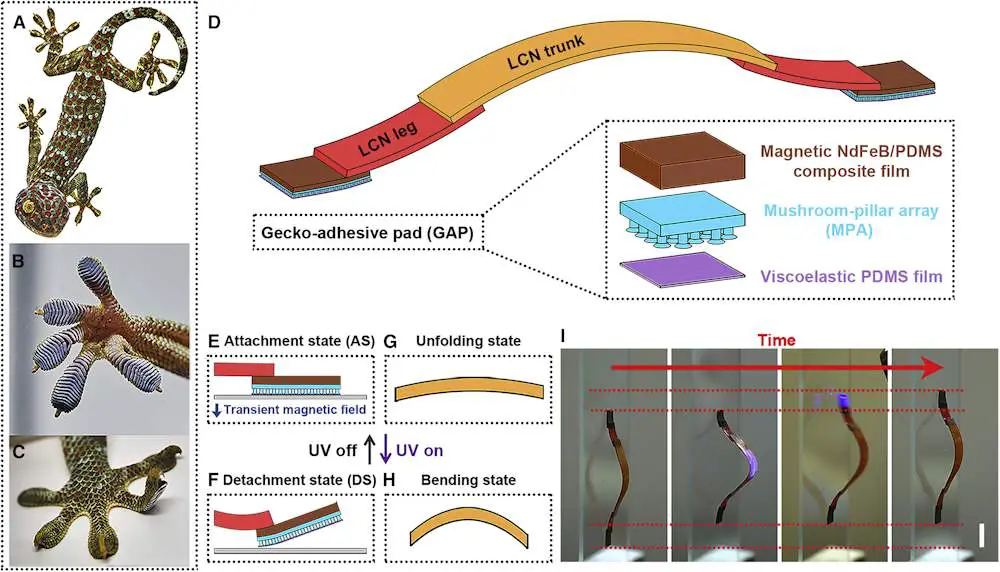
(A-C) Photographies d’un gecko tokay (Gekko gecko) grimpant sur une surface verticale en verre (A) et de l’orteil du gecko dans l’état d’extension-adhésion (attachement) (B) et dans l’état de défilement-relâchement (détachement) (C).
(D) GeiwBot intègre un tronc LCN (jaune), deux jambes LCN (rouge) et deux coussinets adhésifs de gecko (GAP). Le GAP comprend un film composite magnétique NdFeB/PDMS, un réseau de piliers en forme de champignon (MPA) et un film PDMS viscoélastique.
(E-H) Illustration schématique du GAP à (E) l’état d’attachement dynamique (AS) et (F) l’état de détachement (DS), et la déformation réversible du tronc LCN à (G) l’état de dépliage et (H) l’état de flexion.
(I) Performance d’escalade verticale de GeiwBot sur une surface en verre en séquence temporelle. Barre d’échelle : 5 mm.
La prochaine étape pour les chercheurs est de développer un robot doux grimpeur uniquement alimenté par la lumière qui n’a pas besoin d’un champ magnétique et utilise le rayonnement proche infrarouge au lieu de la lumière UV pour améliorer la biocompatibilité.
En synthèse
Le GeiwBot représente une étape importante dans l’innovation en robotique douce. Bien qu’il reste encore des limitations à surmonter, ce développement représente une avancée significative pour l’utilisation de la biomimétique et des matériaux intelligents pour les robots doux.
Comme le souligne le Dr. Boxin Zhao, professeur de génie chimique à l’Université de Waterloo, « La nature est une grande source d’inspiration et la nanotechnologie est une façon passionnante d’appliquer ses leçons ».
Le travail sur le GeiwBot a été publié dans la revue Cell Reports Physical Science sous le titre « Gecko-and-inchworm-inspired untethered soft robot for climbing on walls and ceilings ».
Illustration de l’étude en vidéos
Pour une meilleure compréhension
Qu’est-ce que le GeiwBot ?
Le GeiwBot est un robot miniature développé par des ingénieurs de l’Université de Waterloo. Il est inspiré par la capacité de préhension des geckos et la locomotion des chenilles.
Comment le GeiwBot se déplace-t-il ?
Le GeiwBot utilise la lumière ultraviolette (UV) et la force magnétique pour se déplacer sur n’importe quelle surface, y compris les murs et les plafonds.
Quelle est la taille du GeiwBot ?
Le GeiwBot mesure environ quatre centimètres de long, trois millimètres de large et un millimètre d’épaisseur.
Quelles sont les applications potentielles du GeiwBot ?
Le GeiwBot pourrait être utilisé pour aider les médecins à réaliser des interventions chirurgicales, pour la détection ou la recherche dans des endroits dangereux ou difficiles d’accès lors d’opérations de sauvetage.
Quelle est la prochaine étape pour les chercheurs ?
Les chercheurs envisagent de développer un robot doux grimpeur uniquement alimenté par la lumière qui n’a pas besoin d’un champ magnétique et utilise le rayonnement proche infrarouge au lieu de la lumière UV pour améliorer la biocompatibilité.
Un article sur ces travaux, intitulé « Gecko-and-inchworm-inspired untethered soft robot for climbing on walls and ceilings » (Robot souple non attaché pour grimper aux murs et aux plafonds), est publié dans la revue Cell Reports Physical Science.