Des chercheurs ont mis au point de petits dispositifs robotiques capables de modifier leur mode de déplacement dans l’air en se repliant sur eux-mêmes pendant leur descente.
Ces « microfliers » pourraient révolutionner la manière dont nous déployons des capteurs et des dispositifs de surveillance à distance.
Le pliage origami Miura-ori au service de la robotique
Lorsque ces ‘microfliers’ sont largués depuis un drone, ils utilisent un pliage origami Miura-ori pour passer d’une dispersion chaotique dans l’air à une chute verticale vers le sol.
Pour contrôler la dispersion des ‘microfliers’, les chercheurs ajustent le moment de la transition de chaque dispositif en utilisant différentes méthodes : un capteur de pression embarqué (estimant l’altitude), un minuteur embarqué ou un signal Bluetooth.

Caractéristiques et performances des ‘microfliers’
Les ‘microfliers’ pèsent environ 400 milligrammes, soit à peu près la moitié du poids d’un clou, et peuvent parcourir la distance d’un terrain de football lorsqu’ils sont largués à 40 mètres (environ 131 pieds) dans une légère brise.
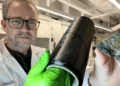
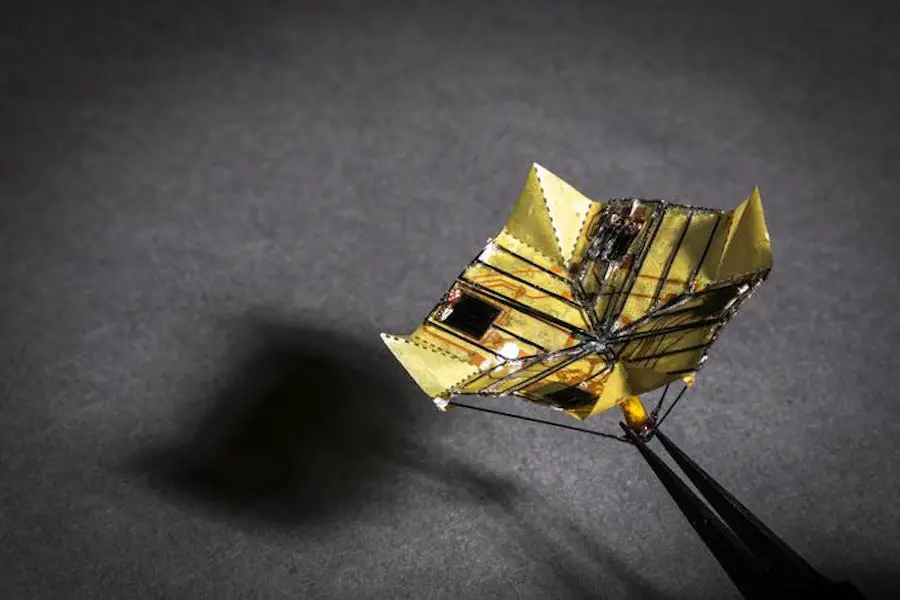
Chaque dispositif est équipé d’un actionneur sans batterie, d’un circuit de récupération d’énergie solaire et d’un contrôleur permettant de déclencher ces changements de forme en plein vol.
Ils ont également la capacité de transporter des capteurs embarqués pour mesurer la température, l’humidité et d’autres conditions pendant leur vol.
Une nouvelle approche pour les microfliers
« L’utilisation de l’origami ouvre un nouvel espace de conception pour les microfliers », a déclaré Vikram Iyer, co-auteur principal et professeur assistant à la Paul G. Allen School of Computer Science & Engineering de l’Université de Washington.
« Nous combinons le pliage Miura-ori, inspiré des motifs géométriques que l’on trouve dans les feuilles, avec la récupération d’énergie et de minuscules actionneurs pour permettre à nos fliers de reproduire le vol de différents types de feuilles en plein air. À l’état déplié, notre structure origami se déplace de manière chaotique dans le vent, à l’image d’une feuille d’orme. Mais en passant à l’état replié, cela modifie l’écoulement de l’air autour d’elle et permet une descente stable, à l’instar de la chute d’une feuille d’érable. Cette méthode très économe en énergie nous permet de contrôler la descente des ‘microfliers’ sans batterie, ce qui n’était pas possible auparavant. »

Défis de conception et perspectives d’avenir
Ces systèmes robotiques surmontent plusieurs défis de conception. Les dispositifs sont suffisamment rigides pour éviter de passer accidentellement à l’état replié avant le signal, et les actionneurs embarqués ne nécessitent que 25 millisecondes pour initier le pliage. Les ‘microfliers’ peuvent changer de forme sans être reliés à une source d’énergie, grâce à leur circuit de récupération d’énergie solaire.
Les ‘microfliers’ actuels ne peuvent effectuer la transition que dans un sens, du mouvement chaotique à la chute verticale. Les chercheurs envisagent de développer des dispositifs capables de transitionner dans les deux sens, permettant ainsi des atterrissages plus précis dans des conditions de vent turbulent.
En synthèse
Les ‘microfliers’ développés par l’Université de Washington représentent une avancée prometteuse dans le domaine de la robotique aérienne. Grâce à leur capacité à changer de forme en plein vol et à transporter des capteurs embarqués, ces dispositifs pourraient révolutionner la manière dont nous déployons des capteurs et des dispositifs de surveillance à distance.
Les chercheurs continuent d’améliorer les performances et les fonctionnalités des ‘microfliers’, ouvrant la voie à de nouvelles applications et à des déploiements plus précis dans des conditions météorologiques variées.
Légende illustration principale : Des chercheurs de l’Université du Wisconsin ont mis au point de petits dispositifs robotiques capables de modifier leur façon de se déplacer dans l’air en se repliant pendant leur descente. Chaque appareil est équipé d’un actionneur embarqué sans batterie, d’un circuit de récupération d’énergie solaire et d’un contrôleur pour déclencher ces changements de forme en plein vol. On voit ici un « microflier » à l’état déplié. Mark Stone/Université de Washington
Les autres co-auteurs de cet article sont Kyle Johnson et Vicente Arroyos, tous deux doctorants à l’Allen School, Amélie Ferran, doctorante au département de génie mécanique, Raul Villanueva, Dennis Yin et Tilboon Elberier, qui ont réalisé ce travail en tant qu’étudiants de premier cycle en génie électrique et informatique, Alberto Aliseda, professeur de génie mécanique à l’UW, Sawyer Fuller, professeur adjoint de génie mécanique à l’UW, et Shyam Gollakota, professeur à l’Allen School à l’UW.
Cette recherche a été financée par une bourse de la Fondation Moore, la National Science Foundation, le National GEM Consortium, le programme de bourses de Google, le programme de bourses de Cadence, le Washington NASA Space Grant Fellowship Program et le programme de bourses SPEEA ACE.
Les résultats de cette recherche ont été publiés le 13 septembre dans la revue Science Robotics. Référence : « Solar-powered Shape-changing Origami Microfliers » – DOI: 10.1126/scirobotics.adg4276