La préhension d’objets est une tâche relativement simple pour les humains. Pourtant, elle met en jeu de nombreux mécanismes complexes. Attraper un objet nécessite un contrôle précis des doigts, de leur positionnement et de la pression qu’applique chacun. Cela requiert des capacités de perception très élaborées. Il n’est donc pas étonnant que la préhension et la manipulation par robot soit un domaine de recherche très actif en robotique.
Aujourd’hui, les mains robotiques industrielles ont remplacé l’humain dans diverses activités complexes et dangereuses, notamment dans la restauration, l’agriculture, l’industrie et la production manufacturière.
De manière générale, les pinces robotiques souples sont mieux adaptées pour manipuler des objets fragiles, comme les fruits et légumes. Cependant, bien que prometteuses pour la récolte, ces pinces souples présentent souvent un inconvénient : leur coût élevé. En effet, la plupart nécessitent un assemblage complexe de multiples composants et cela fait exploser les coûts de développement et de maintenance.
Une pince robotique révolutionnaire inspirée de la nature
Heureusement, une équipe de recherche du Japan Advanced Institute of Technology (JAIST), menée par le professeur associé Van Anh Ho, a trouvé une solution innovante à ces problèmes. S’inspirant de la nature, ils ont développé une pince robotique souple révolutionnaire appelée « ROSE« , pour « Rotation-based Squeezing Gripper« .
Ils ont présenté les détails concernant la conception de ROSE ainsi que les résultats de leur dernière étude lors de la conférence Robotics: Science and Systems 2023 (RSS2023).
Un design ingénieux
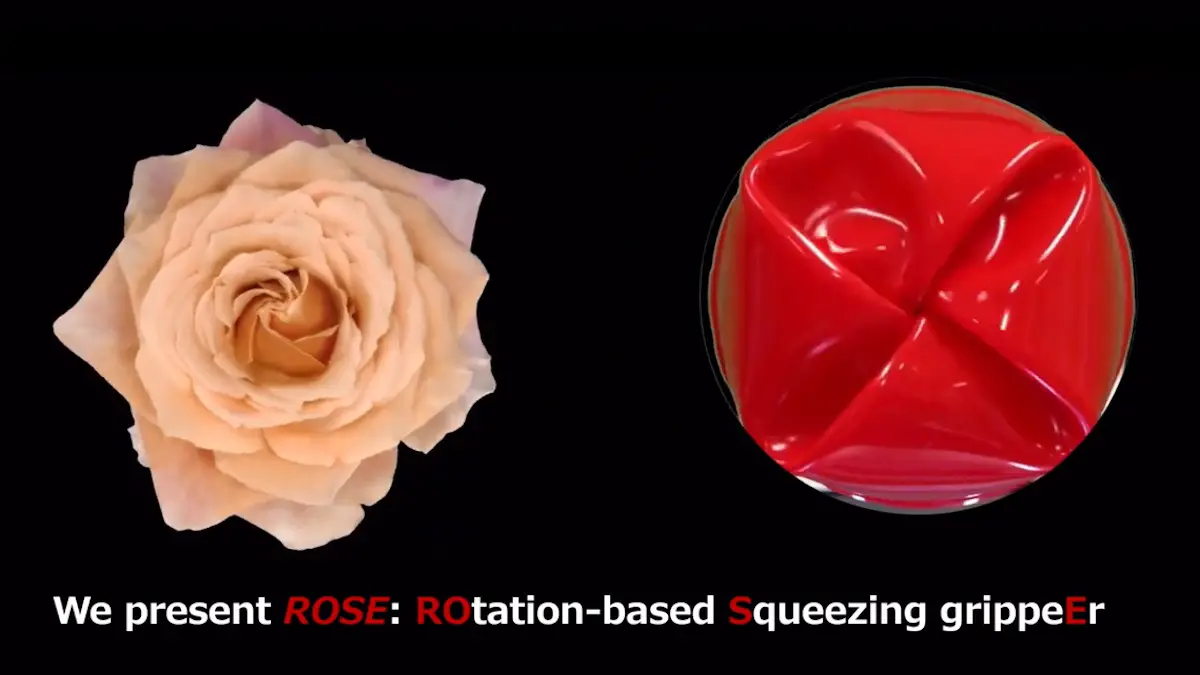
Ce qui rend ROSE si impressionnant, c’est son design. La partie de préhension souple a la forme d’un entonnoir ou d’une manche cylindrique et est reliée à une base circulaire rigide, elle-même fixée au bras d’un actionneur. L’entonnoir doit être placé au-dessus de l’objet à saisir, recouvrant une partie conséquente de sa surface. Puis, l’actionneur fait tourner la base, ce qui amène la peau souple de l’entonnoir à s’enrouler fermement autour de l’objet, comme le montre la vidéo ci-dessous.
Ce mécanisme s’inspire vaguement des roses, qui s’épanouissent le jour et se referment la nuit.
De nombreux avantages par rapport aux pinces conventionnelles
ROSE offre des avantages substantiels en comparaison avec les pinces plus conventionnelles. Premièrement, elle est beaucoup moins coûteuse à fabriquer. Les parties dures peuvent être imprimées en 3D, tandis que l’entonnoir lui-même peut être facilement produit avec un moule et du caoutchouc de silicone liquide. Cela assure un design facilement adaptable et adapté à une production de masse.
Deuxièmement, ROSE peut facilement saisir une grande variété d’objets sans mécanismes de contrôle et de détection complexes. Contrairement aux pinces avec des doigts, la manche de ROSE applique une pression plus douce et uniforme. Cette caractéristique rend ROSE mieux adaptée pour manipuler des produits fragiles, comme les fraises et les poires, ainsi que des objets glissants. Pesant moins de 200 grammes, la pince peut soulever une charge impressionnante, jusqu’à 6812% de son propre poids.
Troisièmement, ROSE est extrêmement durable et robuste. L’équipe a montré qu’elle pouvait continuer à saisir des objets même après 400 000 essais. De plus, l’entonnoir fonctionne toujours correctement même en présence de fissures ou déchirures importantes.
« La pince proposée excelle dans des scénarios exigeants, comme le démontre sa capacité à résister à un test sévère dans lequel nous avons coupé l’entonnoir en quatre sections sur toute la hauteur« , fait remarquer le Prof. Associé Ho. « Ce test souligne la résilience exceptionnelle de la pince et ses performances optimales dans des conditions difficiles. »
Des capacités de détection prometteuses
Enfin, ROSE peut être dotée de capacités de détection. Les chercheurs y sont parvenus en plaçant plusieurs caméras sur le dessus de la base circulaire, pointant vers l’intérieur de l’entonnoir recouvert de marqueurs. Leur position peut être analysée par traitement d’image. Cette approche prometteuse permet d’estimer la taille et la forme de l’objet saisi.

En synthèse
L’équipe de recherche note que ROSE pourrait être une option séduisante pour diverses applications, notamment les opérations de récolte et le tri d’articles en usine. Elle pourrait aussi trouver sa place dans des environnements encombrés comme les fermes, les cuisines professionnelles et les entrepôts.
« La pince ROSE présente un fort potentiel pour révolutionner les applications de préhension et être largement adoptée dans divers domaines« , conclut le Prof. Associé Ho. « Son design simple mais robuste et fiable est appelé à inspirer les chercheurs et fabricants pour une grande variété de tâches de saisie dans un futur proche. »
Pour une meilleure compréhension
Pourquoi la préhension d’objets est-elle complexe pour les robots ?
La préhension d’objets par les robots nécessite un contrôle précis des doigts ainsi que des capacités avancées de perception, d’où la difficulté.
Quels sont les avantages des pinces robotiques souples ?
Les pinces robotiques souples sont mieux adaptées pour manipuler des objets fragiles comme des fruits et légumes. Cependant, elles sont souvent coûteuses à produire.
En quoi la pince ROSE est-elle innovante ?
ROSE est une pince robotique souple dont le design s’inspire des roses. Sa fabrication est peu coûteuse et elle peut saisir une grande variété d’objets de manière fiable et durable.
Comment fonctionne le mécanisme de serrage de ROSE ?
ROSE utilise la rotation pour serrer les objets. L’entonnoir souple s’enroule autour de l’objet quand la base tourne. Ce mécanisme permet un serrage doux et uniforme.
Quels sont les principaux avantages de ROSE ?
Les avantages de ROSE sont : faible coût, capacité à saisir une grande variété d’objets, douceur, robustesse, durabilité, et possibilité d’intégrer des capacités de détection.
Dans quels domaines ROSE pourrait-elle être utilisée ?
ROSE pourrait être utilisée dans l’agriculture, l’industrie alimentaire, la logistique, et plus généralement dans des environnements nécessitant de la manipulation d’objets.
ROSE : Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.