Les ingénieurs du MIT ont mis au point un robot sauteur de la taille d’un insecte, capable de traverser des terrains difficiles et de transporter de lourdes charges.
Les robots à l’échelle de l’insecte peuvent se faufiler là où leurs homologues plus grands ne le peuvent pas, par exemple dans les profondeurs d’un bâtiment effondré à la recherche de survivants après un tremblement de terre.
Toutefois, en se déplaçant dans les décombres, les minuscules robots rampants risquent de rencontrer des obstacles élevés qu’ils ne peuvent escalader ou des surfaces inclinées sur lesquelles ils glisseront. Les robots aériens pourraient éviter ces dangers, mais la quantité d’énergie nécessaire au vol limiterait considérablement la distance que le robot pourrait parcourir dans les décombres avant de devoir retourner à sa base pour se recharger.
Pour obtenir le meilleur des deux méthodes de locomotion, les chercheurs du MIT ont mis au point un robot sauteur capable de franchir des obstacles élevés et de sauter sur des surfaces inclinées ou irrégulières, tout en consommant beaucoup moins d’énergie qu’un robot aérien.
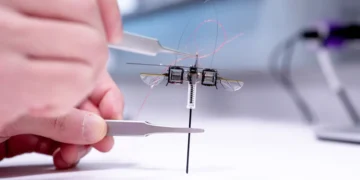
Le robot sauteur, qui est plus petit qu’un pouce humain et pèse moins qu’un trombone, est doté d’une jambe élastique qui le propulse du sol et de quatre modules d’ailes battantes qui le soulèvent et contrôlent son orientation.
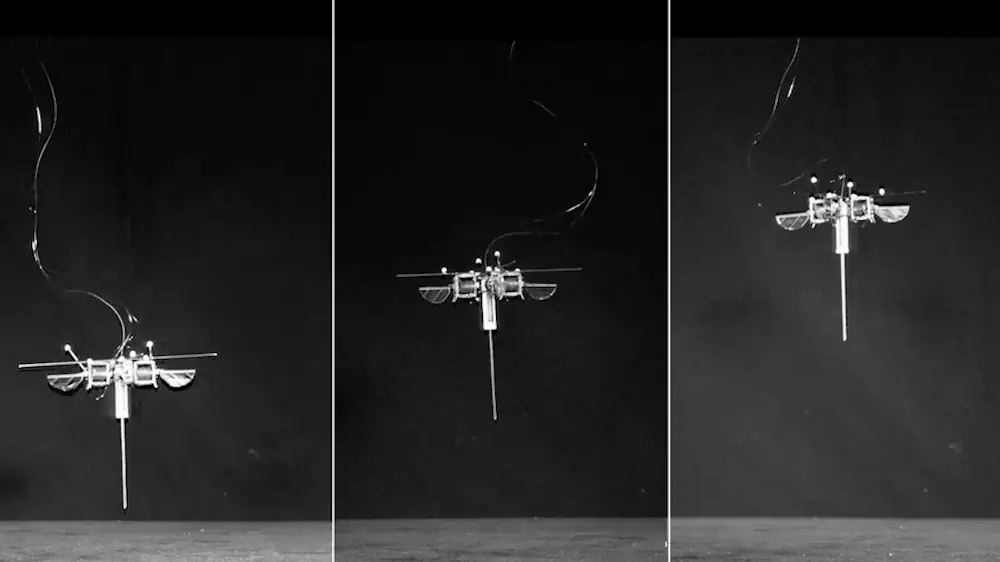
Le robot peut sauter d’environ 20 centimètres dans les airs, soit quatre fois sa hauteur, à une vitesse latérale d’environ 30 centimètres par seconde, et n’a aucune difficulté à sauter sur la glace, les surfaces humides et les sols irréguliers, ou même sur un drone en vol stationnaire. En outre, le robot sauteur consomme environ 60 % d’énergie en moins que son cousin volant.
Grâce à sa légèreté et à sa durabilité, ainsi qu’à l’efficacité énergétique du processus de saut, le robot pourrait transporter une charge utile environ 10 fois supérieure à celle d’un robot aérien de taille similaire, ce qui ouvrirait la voie à de nombreuses nouvelles applications.
« Il est beaucoup plus facile d’installer des batteries, des circuits et des capteurs à bord d’un robot sauteur que d’un robot volant. Nous espérons qu’un jour ce robot pourra sortir du laboratoire et être utile dans des scénarios réels », déclare Yi-Hsuan (Nemo) Hsiao, étudiant diplômé du MIT et co-auteur principal d’un article sur le robot sauteur.
Maximiser l’efficacité
Le saut est courant chez les insectes, qu’il s’agisse des puces qui sautent sur de nouveaux hôtes ou des sauterelles qui bondissent dans une prairie. Si le saut est moins courant chez les robots à l’échelle de l’insecte, qui volent ou rampent généralement, il présente de nombreux avantages en termes d’efficacité énergétique.
Lorsqu’un robot saute, il transforme l’énergie potentielle, qui provient de sa hauteur par rapport au sol, en énergie cinétique lorsqu’il tombe. Cette énergie cinétique se transforme à nouveau en énergie potentielle lorsqu’il touche le sol, puis en énergie cinétique lorsqu’il se relève, et ainsi de suite.
Pour maximiser l’efficacité de ce processus, le robot du MIT est équipé d’une jambe élastique constituée d’un ressort de compression, qui s’apparente au ressort d’un stylo à bille. Ce ressort convertit la vitesse descendante du robot en vitesse ascendante lorsqu’il frappe le sol.
« Si vous disposez d’un ressort idéal, votre robot peut sauter sans perdre d’énergie. Mais comme notre ressort n’est pas idéal, nous utilisons les modules de battement pour compenser la petite quantité d’énergie qu’il perd lorsqu’il entre en contact avec le sol », explique M. Hsiao.
Lorsque le robot rebondit dans les airs, les ailes battantes le soulèvent, tout en s’assurant qu’il reste droit et qu’il a la bonne orientation pour son prochain saut. Les quatre mécanismes des ailes battantes sont actionnés par des actuateurs souples, ou muscles artificiels, qui sont suffisamment durables pour supporter des impacts répétés avec le sol sans être endommagés.
« Nous avons utilisé le même robot pour toute cette série d’expériences et nous n’avons jamais eu besoin de l’arrêter pour le réparer », ajoute M. Hsiao.
La clé des performances du robot est un mécanisme de contrôle rapide qui détermine comment le robot doit être orienté pour son prochain saut. La détection est effectuée à l’aide d’un système externe de suivi des mouvements, et un algorithme d’observation calcule les informations de contrôle nécessaires à l’aide des mesures des capteurs.
Lorsque le robot saute, il suit une trajectoire balistique en décrivant un arc dans l’air. Au sommet de cette trajectoire, il estime sa position d’atterrissage. Ensuite, en fonction de son point d’atterrissage cible, le contrôleur calcule la vitesse de décollage souhaitée pour le prochain saut. Lorsqu’il est en l’air, le robot bat des ailes pour ajuster son orientation afin de toucher le sol avec le bon angle et le bon axe pour se déplacer dans la bonne direction et à la bonne vitesse.
Durabilité et flexibilité
Les chercheurs ont mis le robot sauteur et son mécanisme de contrôle à l’épreuve sur diverses surfaces, notamment l’herbe, la glace, le verre mouillé et le sol irrégulier, qu’il a traversées avec succès. Le robot a même pu sauter sur une surface qui s’inclinait dynamiquement.
« Le robot ne se soucie pas vraiment de l’angle de la surface sur laquelle il atterrit. Tant qu’il ne glisse pas lorsqu’il touche le sol, tout va bien », explique M. Hsiao.
Comme le contrôleur peut gérer plusieurs terrains, le robot peut facilement passer d’une surface à l’autre sans perdre de temps.
Par exemple, sauter sur de l’herbe nécessite une poussée plus importante que sur du verre, car les brins d’herbe provoquent un effet d’amortissement qui réduit la hauteur du saut. Pour compenser, le contrôleur peut injecter plus d’énergie dans les ailes du robot pendant la phase aérienne.
En raison de sa petite taille et de son poids léger, le robot a un moment d’inertie encore plus faible, ce qui le rend plus agile qu’un robot plus grand et mieux à même de résister aux collisions.
Les chercheurs ont démontré son agilité en effectuant des sauts acrobatiques. Le robot poids plume a également pu sauter sur un drone aérien sans endommager l’un ou l’autre, ce qui pourrait s’avérer utile dans le cadre de tâches collaboratives.
En outre, si l’équipe a fait la démonstration d’un robot sauteur qui portait deux fois son poids, la charge utile maximale pourrait être bien plus élevée. L’ajout de poids ne nuit pas à l’efficacité du robot. C’est plutôt l’efficacité du ressort qui est le facteur le plus important qui limite la charge que le robot peut transporter.
À l’avenir, les chercheurs prévoient de tirer parti de sa capacité à transporter de lourdes charges en installant des batteries, des capteurs et d’autres circuits sur le robot, dans l’espoir de lui permettre de sauter de manière autonome en dehors du laboratoire.
« Les robots multimodaux (ceux qui combinent plusieurs stratégies de mouvement) sont généralement un défi, mais ils sont particulièrement impressionnants à une échelle aussi petite. La polyvalence de ce petit robot multimodal – qui se retourne, saute sur un terrain accidenté ou en mouvement, et même sur un autre robot – le rend encore plus impressionnant », conclut Justin Yim, professeur adjoint à l’université de l’Illinois à Urbana-Champagne, qui n’a pas participé à ces travaux. « Les sauts continus démontrés dans cette recherche permettent une locomotion agile et efficace dans des environnements comportant de nombreux obstacles de grande taille.
Hsiao est rejoint dans cet article par les co-auteurs principaux Songnan Bai, professeur assistant de recherche à l’université de Hong Kong, et Zhongtao Guan, étudiant diplômé du MIT qui a effectué ce travail en tant qu’étudiant invité, ainsi que Suhan Kim et Zhijian Ren du MIT ; et les auteurs principaux Pakpong Chirarattananon, professeur associé à la City University of Hong Kong, et Kevin Chen, professeur associé au département de génie électrique et d’informatique du MIT et directeur du laboratoire de robotique molle et de microrobotique au sein du laboratoire de recherche en électronique. La recherche est publiée aujourd’hui dans Science Advances.
Article : « Hybrid locomotion at the insect scale: Combined flying and jumping for enhanced efficiency and versatility » – DOI : 10.1126/sciadv.adu4474
Légende illustration : Des chercheurs du MIT ont mis au point un robot sauteur capable de franchir des obstacles de grande taille et de sauter sur des surfaces inclinées ou irrégulières, tout en consommant beaucoup moins d’énergie qu’un robot aérien. Credit: Melanie Gonick, MIT