Des chercheurs de l’Université de Coimbra au Portugal ont récemment développé une nouvelle main robotique souple qui pourrait être plus abordable et plus facile à fabriquer. Leur conception, présentée dans « Cyborg and Bionic Systems« , intègre des actionneurs souples avec un exosquelette, qui peuvent tous deux être produits à l’aide de techniques évolutives.
Les robots bioinspirés à actionneurs souples représentent une nouvelle approche prometteuse en robotique. Leur capacité intrinsèque à s’adapter aux incertitudes de l’environnement en fait des systèmes polyvalents pour diverses applications. Cependant, leur conception et leur fabrication restent complexes.
Cette étude présente une main robotique souple bioinspirée, similaire à la main humaine. Elle est composée d’un exosquelette imprimé en 3D et de 5 actionneurs pneumatiques en silicone moulé. La géométrie multimatériaux de la main a été optimisée par analyse par éléments finis pour promouvoir la flexibilité des doigts.
Un contrôleur simple de type ON/OFF permet de maintenir des angles de flexion stables pour la préhension d’objets. Cette approche intégrée, de la conception à la fabrication et au contrôle, permet la réalisation de mains robotiques souples à moindre coût et en un temps réduit.
Conception bioinspirée d’une main robotique souple
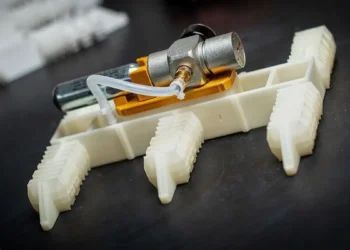
La main robotique développée s’inspire de la morphologie et des capacités de préhension de la main humaine. Elle est composée de 5 doigts actionnés de manière pneumatique par des actionneurs en silicone moulé. Chaque doigt comprend un actionneur creux renforcé par un fil en polyéthylène téréphtalate (PET) et enveloppé par un exosquelette en polyuréthane thermoplastique (TPU) imprimé en 3D.
La géométrie de la main a été optimisée par analyse par éléments finis (EF) pour promouvoir la flexibilité des doigts. Le renforcement en PET évite l’effet de gonflement radial de l’actionneur lors de sa pressurisation, favorisant son allongement axial. L’exosquelette flexible se déforme alors pour permettre la flexion du doigt.

Fabrication par moulage et impression 3D
Les actionneurs en silicone ont été fabriqués par moulage, tandis que l’exosquelette a été imprimé en 3D en une seule étape. Cette approche de fabrication accélère la réalisation de la main robotique à moindre coût.
Le moulage permet de réaliser des actionneurs creux avec une géométrie simple. L’impression 3D facilite l’intégration de géométries complexes pour l’exosquelette, élément le plus sophistiqué de la main.
Contrôle en boucle fermée de la flexion
La flexion des doigts est contrôlée par une boucle fermée de type ON/OFF. Des capteurs de pression absolue mesurent la pression interne des actionneurs. Un microcontrôleur commande alors l’ouverture et la fermeture de vannes pour maintenir les pressions internes désirées.
Ce contrôleur simple permet de conserver des angles de flexion stables pour la préhension, même en présence de fuites d’air dans le système pneumatique.
Une approche intégrée intéressante
Cette étude présente une approche intégrée pour la conception, la fabrication et le contrôle de mains robotiques souples. La modélisation par éléments finis, le moulage, l’impression 3D et la commande en boucle fermée sont combinés de manière efficace.
Cette solution permet la réalisation de mains robotiques souples à moindre coût et en un temps réduit. Elle ouvre la voie à des applications innovantes de la robotique souple dans des environnements incertains.
En synthèse
Cette nouvelle main robotique souple développée par des chercheurs portugais s’inspire de la nature pour reproduire l’apparence et les capacités de la main humaine. Grâce à l’utilisation de matériaux souples et d’une fabrication simplifiée, elle pourrait permettre de produire des robots humanoïdes sûrs et polyvalents à moindre coût.
Pour une meilleure compréhension
Pourquoi développer des robots souples ?
Les robots souples imitent mieux les mouvements des humains et des animaux. Ils sont plus sûrs en cas de collision et peuvent mieux coexister avec nous dans notre environnement.
Quels sont les défis actuels des robots souples ?
Beaucoup sont difficiles à produire à grande échelle à cause du coût élevé ou de la complexité de fabrication.
Comment cette nouvelle main robotique y répond-elle ?
En utilisant une approche bio-inspirée et des techniques de fabrication simplifiées et évolutives pour la rendre plus abordable.
Quels sont ses principaux atouts ?
Elle reproduit les capacités de la main humaine. Son exosquelette et ses actionneurs souples lui permettent de saisir divers objets.
Comment les chercheurs comptent-ils l’améliorer ?
En travaillant sur les actionneurs, les capteurs et le contrôle par intelligence artificielle pour étendre ses possibilités.
Quels sont ses applications potentielles ?
Tester de nouveaux algorithmes d’IA, aider les humains au quotidien et rendre les robots humanoïdes plus accessibles.
Légende illustration principale – main robotique souble – Crédit : Alves et al