La recherche sur la miniaturisation des robots soulève des enjeux technologiques considérables pour la communauté scientifique. Les chercheurs se concentrent sur le développement de micro-robots qui peuvent naviguer dans des environnements complexes et visqueux, à l’image des micro-organismes naturels. Dernièrement, une équipe de scientifiques du monde entier a réalisé une avancée notable, laissant entrevoir un avenir riche en applications médicales et environnementales.
Un micro-robot toroïdal autonome
Des chercheurs de l’Université de Tampere en Finlande et de l’Université Anhui Jianzhu en Chine ont mis au point le premier micro-robot toroïdal capable de se mouvoir de manière autonome dans des liquides visqueux, tels que le mucus. Cette innovation marque une étape importante dans le développement de micro-robots aptes à naviguer dans des environnements complexes.
Le dispositif s’inspire des méthodes ingénieuses employées par les micro-organismes pour se déplacer dans leur milieu visqueux. Par exemple, les bactéries E. coli utilisent des mouvements hélicoïdaux, les cils se meuvent en vagues coordonnées, et les flagelles s’appuient sur un battement en forme de fouet pour progresser.
Une technologie basée sur l’élastomère cristallin liquide
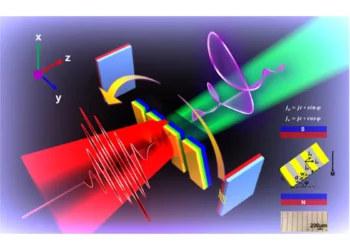
Au cœur de cette recherche pionnière se trouve un matériau synthétique appelé élastomère cristallin liquide. Ce dernier réagit à des stimuli tels que les lasers. Lorsqu’il est chauffé, il effectue une rotation sur lui-même grâce à un mode zéro-énergie élastique (ZEEM), résultant de l’interaction entre les forces statiques et dynamiques.
Zixuan Deng, chercheur doctoral à l’Université de Tampere et premier auteur de l’étude, a expliqué : «Les implications de cette recherche dépassent le cadre de la robotique, avec des impacts potentiels dans des domaines tels que la médecine et la surveillance environnementale. À titre d’exemple, cette innovation pourrait être utilisée pour le transport de médicaments à travers le mucus physiologique et le déblocage des vaisseaux sanguins après la miniaturisation du dispositif».
Une forme toroïdale pour simplifier le contrôle
La forme toroïdale, ou en forme de beignet, a été envisagée pour la première fois par le physicien Edward Purcell en 1977 pour améliorer la navigation des organismes microscopiques dans des environnements où les forces visqueuses prédominent et les forces inertielles sont négligeables. Cette avancée dans la conception toroïdale a simplifié le contrôle des robots nageurs, éliminant ainsi le besoin d’architectures complexes.
En utilisant un seul faisceau lumineux pour déclencher un mouvement non réciproque, ces robots exploitent le ZEEM pour déterminer automatiquement leurs mouvements. «Notre innovation permet une nage libre tridimensionnelle dans le régime de Stokes et offre de nouvelles possibilités pour explorer des espaces confinés, tels que les environnements microfluidiques. De plus, ces robots toroïdaux peuvent alterner entre les modes de roulement et d’autopropulsion pour s’adapter à leur environnement» a précisé pour conclure Zixuan Deng.
Les recherches futures exploreront les interactions et la dynamique collective de plusieurs tores, ce qui pourrait conduire à de nouvelles méthodes de communication entre ces micro-robots intelligents.
Légende illustration : Les sous-marins toroïdaux en élastomère cristallin liquide peuvent se mettre à nager dans le miel lorsque des rayons laser sont dirigés vers eux. Photo:Hao Zeng, Université de Tampere
L’étude, intitulée «Light-steerable locomotion using zero-elastic-energy modes», a récemment été publiée dans Nature Materials. s41563-024-02026-4