La mobilité humaine, souvent considérée comme un droit fondamental, devient une préoccupation croissante dans des sociétés où les capacités physiques diminuent avec l’âge ou en raison de maladies. Face à ce phénomène, la recherche scientifique s’efforce d’apporter des solutions novatrices capables d’améliorer la qualité de vie tout en redonnant une certaine autonomie aux personnes concernées. Une innovation développée par des chercheurs thaïlandais pourrait bien marquer un tournant significatif dans cette quête.
Au neuvième étage du bâtiment Chulapat-14, situé au sein de la Faculté de Génie de l’Université Chulalongkorn, se trouve un espace unique. Ce lieu, qualifié de véritable sanctuaire pour passionnés de robotique, accueille aussi bien des étudiants locaux qu’internationaux ainsi que des chercheurs étrangers. Ensemble, ils collaborent sur des projets visant à concevoir des robots destinés aux secteurs médical et industriel.
L’Associate Professor Dr. Ronnapee Chaichaowarat, membre de l’École internationale d’ingénieurs (ISE), a décrit cet environnement comme étant une solution alternative à l’éducation traditionnelle. « Il s’agit d’un espace conçu pour permettre aux étudiants de monter eux-mêmes des robots durant leur temps libre », a-t-il affirmé. Un principe central y est appliqué : le “Proof of Concept” ou Preuve de concept.
Le prototype Exoskeleton Wheelchair
Dans ce laboratoire, plusieurs types de robots ont été conçus, mais l’un d’eux attire particulièrement l’attention : le “Transformable Wheelchair-Exoskeleton Hybrid Robot for Assisting Human Locomotion” ou en français, le Robot hybride transformable en fauteuil roulant-exosquelette pour l’assistance à la locomotion humaine, plus communément appelé Wheelchair Exoskeleton (Exosquelette pour fauteuil roulant). Ce dispositif hybride combine une chaise roulante et un exosquelette portatif capable d’assister la locomotion humaine.
« J’ai souhaité créer une chaise roulante capable de marcher », a expliqué Assoc. Prof. Dr. Ronnapee. « Une chaise classique ne peut ni monter dans un bus ni gravir des escaliers. Si celle-ci pouvait aider son utilisateur à se lever et à marcher, cela faciliterait grandement leurs déplacements. » Leur inspiration repose sur une volonté de contourner les limites imposées par les fauteuils traditionnels.

Conception technique et matériaux innovants
Chaque composant du robot a été méticuleusement dessiné à l’aide de logiciels 3D CAD. Le choix des matériaux revêt une importance particulière. La fibre de carbone, légère et malléable, constitue la base de nombreux éléments fabriqués grâce à des imprimantes 3D. D’autres pièces sont découpées à l’aide d’une machine CNC.
Une fois assemblé, le contrôle du mouvement est divisé en deux parties distinctes. Des étudiants programment les vitesses des roues avant afin de garantir une trajectoire rectiligne ou des virages précis. En parallèle, Assoc. Prof. Dr. Ronnapee supervise lui-même la gestion des moteurs situés aux articulations des hanches et des genoux.

Intégration de la biomécanique humaine
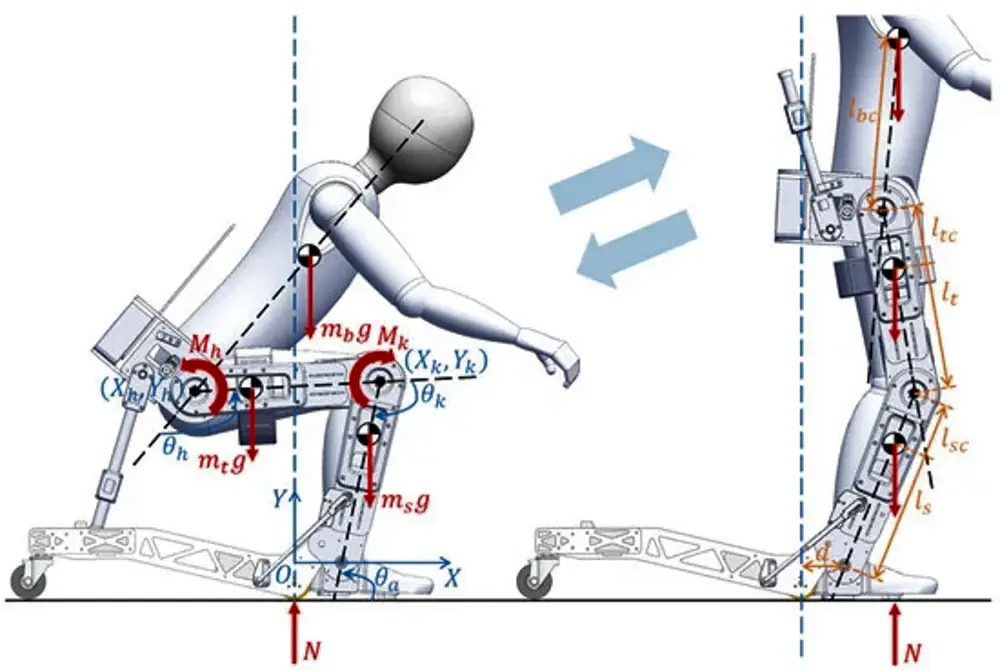
Pour concevoir un exosquelette fonctionnel, il est indispensable de prendre en compte l’anatomie humaine. « La conception doit respecter l’ergonomie du corps humain afin d’éviter toute irritation cutanée ou contrainte excessive », a précisé Assoc. Prof. Dr. Ronnapee. Les mouvements naturels des jambes, notamment la flexion des genoux, sont reproduits grâce à des liaisons cinématiques complexes.
Les connaissances en biomécanique ont permis de calculer les couples générés autour des chevilles, genoux et hanches, assurant ainsi une adéquation optimale entre le robot et la physiologie humaine.
Le financement initial du prototype provient d’une subvention accordée par le Conseil National de Recherche Thaïlandais (NRCT). Toutefois, Assoc. Prof. Dr. Ronnapee souligne que le développement futur nécessitera davantage de ressources financières. « Investir dans la robotique reste risqué pour nombre d’entreprises. Cependant, l’accroissement de la population âgée stimulera probablement la production de robots portables », a-t-il ajouté.
Des partenariats interdisciplinaires seront également essentiels. Par exemple, des compétences en architecture contribueront à améliorer l’esthétique des dispositifs tandis que des experts en sciences alliées accompagneront les utilisateurs finaux.
Les prochaines étapes
Actuellement, un deuxième prototype est en cours de développement, avec une attention particulière portée à la stabilité lors des transitions assis-debout-marche. Une demande de brevet a été initiée, et des tests cliniques avec des patients sont prévus sous réserve d’approbation éthique.
Assoc. Prof. Dr. Ronnapee conclut : « Une fois validé, ce projet servira non seulement les personnes ayant des difficultés de mobilité mais représentera aussi une fierté nationale, capable de rivaliser avec les innovations internationales. »
Légende illustration : Prof. assoc. Dr. Ronnapee Chaichaowarat. Essai du fauteuil roulant Exoskeleton
Source : Université de Chulalongkorn