Deb Newman | Pietro Valdastri | Nikita Greenidge ( Leeds )
Des chercheurs ont mis au point un minuscule robot magnétique capable de prendre des images en 3D à l’intérieur du corps et qui pourrait révolutionner la détection précoce du cancer.
L’équipe, dirigée par des ingénieurs de l’université de Leeds, affirme que c’est la première fois qu’il est possible de générer des images ultrasonores tridimensionnelles à haute résolution à partir d’une sonde placée au plus profond du tractus gastro-intestinal, ou intestin.
Cela ouvre la voie à une transformation du diagnostic et du traitement de plusieurs formes de cancer en permettant des « biopsies virtuelles » – des scanners non invasifs qui fournissent des données diagnostiques immédiates, permettant aux médecins de détecter, de stadifier et éventuellement de traiter les lésions en une seule procédure : éliminant ainsi le besoin de biopsies physiques.
La clé du succès de l’équipe, peut-être surprenante, a été l’utilisation d’une forme 3D peu connue, l’oloïde, qui a donné au robot médical magnétique une amplitude de mouvement jusqu’alors impossible – le roulis – essentielle pour une navigation et une imagerie précises à l’intérieur du corps.
Un article, publié hier (26 mars) dans Science Robotics, explique comment l’équipe a intégré la forme oloïde et son mouvement de roulis unique dans un nouvel endoscope magnétique flexible (EMF). Elle l’a équipé d’un petit dispositif d’imagerie à haute fréquence pour capturer des images 3D détaillées des tissus internes.
Cette technologie est le fruit d’une collaboration entre des ingénieurs, des scientifiques et des cliniciens de l’université de Leeds, de l’université de Glasgow et de l’université d’Édimbourg. Leeds a dirigé le développement de la robotique et l’intégration de la sonde, tandis que Glasgow et Edinburgh ont fourni la sonde à ultrasons et dirigé la composante d’imagerie.
Pietro Valdastri, professeur et titulaire de la chaire de robotique et de systèmes autonomes et directeur du laboratoire STORM, a coordonné les recherches à l’origine de cet article. Il a déclaré : « Pour la première fois, cette recherche nous permet de reconstruire une image échographique en 3D prise par une sonde à l’intérieur de l’intestin, ce qui n’avait jamais été fait auparavant. Cette approche permet d’analyser les tissus in situ et de diagnostiquer le cancer colorectal, avec des résultats immédiats. Le processus de diagnostic du cancer colorectal nécessite actuellement le prélèvement d’un échantillon de tissu, qui est ensuite envoyé à un laboratoire, et dont les résultats prennent entre une et trois semaines ».
Le dispositif d’imagerie – un réseau de micro-ultrasons de 28 MHz – crée une reconstruction 3D à haute résolution de la zone qu’il scanne. À partir de cette reconstruction virtuelle, les cliniciens peuvent réaliser des images en coupe qui imitent celles générées par une biopsie standard, au cours de laquelle un échantillon de tissu est découpé en fines couches et placé sur une lame pour être examiné au microscope.
L’échographie à haute fréquence ou à haute résolution est différente de l’échographie que la plupart d’entre nous connaissent, utilisée pour examiner un fœtus ou des organes internes. La sonde à ultrasons haute fréquence/résolution utilisée dans cette étude permet aux utilisateurs de voir les caractéristiques au niveau microscopique, jusqu’aux détails de la couche tissulaire.
Alors que l’échographie 3D peut déjà être réalisée dans les vaisseaux sanguins et dans le rectum, ces travaux ouvrent la possibilité de réaliser des scans 3D plus profondément dans le tractus gastro-intestinal.
« Pour la première fois, cette recherche nous permet de reconstruire une image échographique en 3D prise par une sonde au plus profond de l’intestin, ce qui n’avait jamais été fait auparavant. » a dit le Professeur Pietro Valdastri, École d’ingénierie électronique et électrique
Nikita Greenidge, chercheuse de troisième cycle, membre du laboratoire STORM de Leeds, à l’école d’ingénierie électronique et électrique, est l’auteur principal de l’article. Elle explique : « En associant notre robotique avancée à l’imagerie médicale par ultrasons, nous faisons progresser cette innovation d’un cran par rapport à la coloscopie traditionnelle, en permettant aux médecins de diagnostiquer et de traiter en une seule procédure – éliminant ainsi l’attente entre le diagnostic et l’intervention. Cela rend non seulement le processus plus confortable pour les patients, mais réduit également les temps d’attente, minimise les procédures répétées et atténue l’anxiété liée à l’attente des résultats d’un cancer potentiel. »
Elle a ajouté : « Le cancer colorectal est l’une des principales causes de décès liés au cancer au Royaume-Uni et dans le monde, mais s’il est détecté à un stade précoce, il est très facile à traiter. Cette recherche présente une nouvelle approche qui pourrait améliorer considérablement le diagnostic précoce grâce à une approche peu invasive et pourrait également, à l’avenir, faciliter l’administration de médicaments ciblés déclenchée par ultrasons pour un traitement plus efficace ».

La recherche a été financée par l’UKRI Conseil de recherche en sciences physiques et de l’ingénieur (EPSRC), la Commission européenne (CE), le Conseil européen de la recherche (CER) et le NIHR Leeds Biomedical Research Centre. L’étude a montré que l’utilisation de l’oloïde – une forme formée par deux cercles perpendiculaires qui se croisent – améliorait considérablement la dextérité, les capacités de diagnostic et l’autonomie des endoscopes magnétiques flexibles et des robots médicaux magnétiques en général.
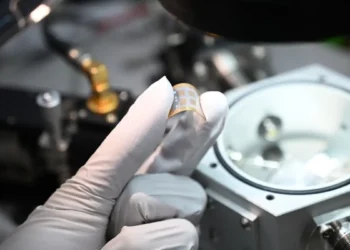
L’endoscope magnétique oloïde (OME) a été imprimé en 3D à partir de résine et ne mesure que 21 mm de diamètre, soit environ la taille d’une pièce de 1 pence, ce qui signifie que le robot peut encore rouler, mais qu’il est d’une taille et d’une conception pratiques pour des applications cliniques telles que la coloscopie. Ses mouvements ont été testés sur une série de surfaces simulant les structures du côlon, de l’œsophage et de l’estomac.
Pour faire progresser la technologie en vue d’essais sur l’homme, l’équipe a d’abord effectué des tests sur un côlon artificiel, puis des études sur des porcs, une étape nécessaire pour répondre aux exigences réglementaires en vue de l’homologation d’un dispositif médical. Ils ont utilisé un aimant permanent externe à commande robotique, une plate-forme développée précédemment à Leeds qui permet de contrôler l’OME à l’aide d’un joystick et de manière autonome. La navigation était assistée par des images provenant d’une caméra intégrée et d’un système de localisation magnétique.
Les résultats ont démontré que le système pouvait
- Effectuer avec succès des mouvements de roulement et de balayage contrôlés à l’intérieur du côlon.
- Générer des échographies 3D à haute résolution pour un diagnostic précis.
- Identifier des lésions dans les tissus gastro-intestinaux, démontrant ainsi son potentiel pour l’imagerie médicale avancée et la détection précoce des maladies.
Mme Greenidge a déclaré que, bien que cette recherche ait été menée sur le côlon, les propriétés de roulement de la forme oloïde pourraient être appliquées à une variété de robots médicaux magnétiques, ce qui permettrait d’étendre ses applications à d’autres régions du corps.
L’équipe va maintenant s’atteler à la collecte de toutes les données qui lui permettront de mener des essais sur l’homme, qui, espèrent-ils, pourraient débuter en 2026, car la plateforme de Leeds pour la coloscopie robotisée sans capacités ultrasonores fait déjà l’objet d’essais sur l’homme et est commercialisée par Atlas Endoscopy, une entreprise de Leeds créée par le laboratoire STORM.
La science des robots magnétiques
Les champs magnétiques sont idéaux pour les applications médicales car ils traversent sans danger les tissus humains et permettent la manipulation à distance de minuscules robots chirurgicaux. Les mouvements de roulement et de balayage contrôlés sont essentiels pour une navigation et une imagerie précises à l’intérieur du corps. Cependant, il est impossible de faire rouler des robots cylindriques en utilisant un champ magnétique externe.
Les robots magnétiques cylindriques ne peuvent atteindre que cinq degrés de liberté, c’est-à-dire les façons dont un objet peut se déplacer. Cela a été considéré comme une limitation : Les scanners 3D n’étaient pas possibles sans le mouvement de roulement. Bien que la gravité fasse rouler un cylindre ou une sphère sur une pente, il n’est pas possible de les faire rouler en utilisant des forces magnétiques externes. L’utilisation de l’oloïde a permis de résoudre ce problème, car sa géométrie unique facilite naturellement un mouvement de roulement sinueux qui couple le roulement aux rotations de haut en bas et d’un côté à l’autre. L’oloïde ne présentant pas de symétrie autour d’un axe central, l’aimant externe peut appliquer un couple – ou une force de torsion – à l’intérieur du corps, dans deux directions, pour provoquer le mouvement de roulis.
Mme Greenidge a précisé : « Nos résultats suggèrent de nouvelles possibilités d’approches interdisciplinaires de la robotique médicale, en montrant comment des principes mathématiques tels que la géométrie simple peuvent résoudre des problèmes de santé dans le monde réel ».

Le professeur Sandy Cochran, du Centre pour les ultrasons médicaux et industriels de l’université de Glasgow, qui a dirigé le volet ultrasons de l’étude, a commenté : « L’imagerie par ultrasons est sûre, peu coûteuse et peut être déployée exactement là où elle est nécessaire. Grâce à cette approche collaborative, qui associe l’imagerie médicale par ultrasons et la robotique de pointe, nous espérons contribuer à transformer le diagnostic et le traitement du cancer, ainsi que la prise en charge des patients. »
L’équipe pense que les avancées qu’elle a réalisées pourraient conduire à un changement fondamental dans l’endoscopie, où les endoscopistes pourraient se concentrer sur les décisions diagnostiques et thérapeutiques critiques tandis que des systèmes autonomes s’occuperaient de la navigation et des tâches de routine.
Ils pensent également que l’amélioration de la dextérité et des capacités de diagnostic de l’OME pourrait contribuer à réduire les disparités entre les sexes dans les coloscopies, car les procédures d’endoscopie flexible standard ont tendance à être plus difficiles chez les femmes, ce qui entraîne des taux plus élevés de procédures incomplètes.
Jane Nicholson, directrice exécutive de la recherche à l’EPSRC, a conclu : « Les progrès réalisés dans le domaine des technologies de pointe permettent de mettre au point des solutions rapides et non invasives susceptibles de révolutionner le diagnostic et le traitement du cancer. En améliorant la précision et le contrôle des procédures pour les cancers à forte incidence comme le cancer colorectal, les efforts de cette équipe interdisciplinaire pourraient conduire à des avancées significatives dans la détection et le traitement du cancer ».
Légende : Endoscope magnétique en forme d’oloïde. Crédit : STORM Lab, Université de Leeds
Article : « Harnessing the oloid shape in magnetically driven robots to enable high-resolution ultrasound imaging » – Science Robotics – DOI : 10.1126/scirobotics.adq4198