Jamie Oberdick, ( Université de l’État de Pennsylvanie )
Un robot flexible et semi-autonome pourrait trouver des victimes de catastrophes enterrées dans les décombres et leur administrer des médicaments à l’intérieur du corps.
Un robot minuscule, souple et flexible, capable de ramper dans les décombres d’un tremblement de terre pour retrouver des victimes prises au piège ou de voyager à l’intérieur du corps humain pour délivrer des médicaments peut sembler relever de la science-fiction, mais une équipe internationale dirigée par des chercheurs de l’État de Pennsylvanie est à l’origine de ces robots adaptables en intégrant des composants électroniques flexibles à des mouvements contrôlés par magnétisme.
| Points forts |
|---|
| Un robot électronique souple et non attaché qui intègre des matériaux composites à réaction magnétique, permettant une programmation réversible et une gamme variée de mouvements et de formes. L’intégration sans faille d’un système électronique souple et flexible méticuleusement conçu au robot magnétique souple garantit l’exécution stable et précise de fonctions électriques multimodales tout en préservant l’intégrité de son mouvement mécanique. La démonstration complète illustre la faisabilité du robot magnétique souple intégré et non attaché, en mettant en évidence son fonctionnement stable, son adaptabilité et sa capacité à exécuter des tâches complexes dans diverses conditions. |
Les robots souples, contrairement aux robots rigides traditionnels, sont fabriqués à partir de matériaux flexibles qui imitent les mouvements des organismes vivants. Cette flexibilité les rend idéaux pour naviguer dans des espaces restreints, tels que les débris dans une zone sinistrée ou les voies complexes du corps humain. Cependant, l’intégration de capteurs et d’électronique dans ces systèmes flexibles a posé un défi important, selon Huanyu « Larry » Cheng, James L. Henderson, Jr. Memorial de sciences de l’ingénieur et de mécanique à Penn State.
« Le plus grand défi consistait à rendre ces systèmes intelligents », a dit M. Cheng, co-auteur correspondant de l’étude de l’équipe publiée dans Nano-Micro Letters. « Pour la plupart des applications, la robotique douce est un système de communication à sens unique, c’est-à-dire qu’elle dépend d’une commande externe pour naviguer dans des environnements complexes. Notre objectif était d’intégrer des capteurs intelligents afin que ces robots puissent interagir avec leur environnement et fonctionner avec une intervention humaine minimale. »
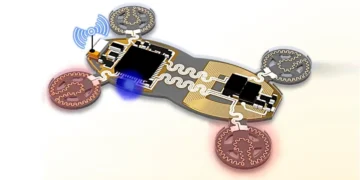
L’un des principaux facteurs permettant de rendre ces robots plus intelligents réside dans l’intégration d’une électronique flexible, qui permet de réaliser leurs principales fonctions.
« Nous voulions concevoir un système où la robotique douce et l’électronique flexible fonctionnent ensemble de manière transparente », explique M. Cheng. « L’électronique traditionnelle est rigide, ce qui rend l’intégration difficile. Notre solution a consisté à répartir les composants électroniques de manière à préserver la flexibilité du robot tout en maintenant des performances robustes. »
M. Cheng et son équipe ont filmé les robots en action, capturant leur comportement dynamique lorsqu’ils rampent et se roulent en boule pour se déplacer le long d’un parcours simple. Les robots se déplacent à l’aide de matériaux magnétiques durs intégrés dans leur structure flexible, ce qui leur permet de réagir de manière prévisible à un champ magnétique externe. En ajustant l’intensité et la direction du champ, les chercheurs peuvent contrôler les mouvements des robots, tels que la flexion, la torsion ou la reptation, sans alimentation embarquée ni connexions physiques telles que des fils.
L’un des principaux obstacles au développement de cette technologie a été de trouver le moyen d’empêcher l’électronique flexible d’entraver les mouvements du robot.
« Même si nous avons conçu l’électronique pour qu’elle soit flexible, sa rigidité est encore des centaines, voire des milliers de fois supérieure à celle du matériau robotique souple », ajoute M. Cheng. « Pour y remédier, nous avons réparti les composants électroniques sur la structure, ce qui a permis de réduire leur impact sur les mouvements. »
Un autre défi consistait à bloquer les interférences électriques indésirables, qui peuvent perturber le fonctionnement d’un appareil ou d’un système électronique. Ces interférences proviennent de sources extérieures, comme d’autres appareils électroniques ou des signaux sans fil. Ces interférences entravent les mouvements et affectent les performances des capteurs.
« Les champs magnétiques sont essentiels pour contrôler les mouvements, mais ils peuvent également perturber les signaux électroniques », note M. Cheng. « Nous avons dû concevoir avec soin l’agencement électronique pour minimiser ces interactions, en veillant à ce que les capteurs restent fonctionnels même en présence de champs magnétiques intenses. »
Les interférences magnétiques étant réduites au minimum, les robots peuvent être guidés à distance à l’aide de champs électromagnétiques ou d’aimants portatifs, ce qui limite l’intervention humaine dont ils ont besoin. En outre, les capteurs intégrés leur permettent de réagir de manière autonome aux signaux environnementaux. Dans le domaine de la recherche et du sauvetage, par exemple, ils sont suffisamment intelligents pour naviguer parmi les débris en détectant la chaleur ou les obstacles. Dans les applications médicales, ils peuvent réagir aux changements de pH ou à la pression, garantissant ainsi une administration précise des médicaments ou un prélèvement exact des échantillons.
La prochaine étape pour l’équipe de M. Cheng est d’affiner la technologie pour de telles applications, y compris la création d’une « pilule robotisée ».
« L’une des applications potentielles les plus fascinantes concerne les dispositifs médicaux implantables », a commenté Suk-Won Hwang, coauteur et professeur associé à la Graduate School of Converging Science and Technology de l’université de Corée. « Nous travaillons à la miniaturisation du système pour qu’il puisse être utilisé dans le domaine biomédical. Imaginez un petit système robotique qui pourrait être avalé comme une pilule, naviguer dans le tractus gastro-intestinal et détecter des maladies ou administrer des médicaments précisément là où ils sont nécessaires ».
Selon les chercheurs, une telle technologie pourrait constituer une alternative moins invasive aux procédures de diagnostic traditionnelles, telles que les biopsies, en recueillant des données directement auprès du patient en temps réel.
« Grâce à des capteurs intégrés, ces robots pourraient mesurer les niveaux de pH, détecter des anomalies et même administrer des médicaments à des endroits précis à l’intérieur du corps », ajoute M. Cheng. « Cela signifie moins d’interventions chirurgicales invasives et des traitements plus ciblés, ce qui améliore les résultats pour les patients. »
M. Cheng a déclaré qu’il envisageait également des applications futures dans le domaine des traitements vasculaires.
« Si nous parvenons à rendre ces robots encore plus petits, ils pourraient être injectés dans les vaisseaux sanguins pour traiter les maladies cardiovasculaires ou délivrer des médicaments directement dans les zones affectées », a déclaré M. Cheng. « Cela ouvrirait de toutes nouvelles possibilités de traitements médicaux non invasifs. »
Bien que l’équipe n’ait pas encore donné de nom officiel à ces robots, M. Cheng a déclaré qu’elle était ouverte aux suggestions. « C’est une bonne suggestion », dit-il en riant. « Peut-être devrions-nous impliquer le public dans l’attribution de leur nom. »
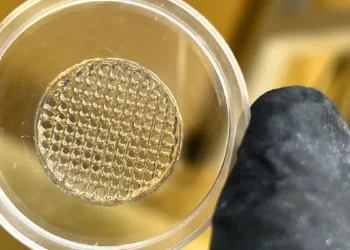
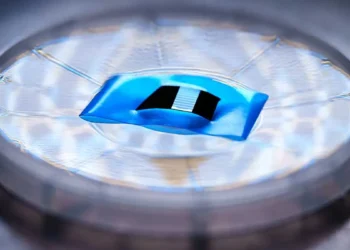
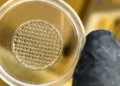
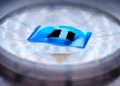
Légende illustration : Ces minuscules robots utilisent le magnétisme pour se déplacer et explorer les espaces restreints, y compris les décombres d’une catastrophe ou le corps humain. Crédit : Jennifer M. McCann.
Article : « Wireless, Multifunctional System-Integrated Programmable Soft Robot » – DOI : 10.1007/s40820-024-01601-3#Ack1