Un véhicule sous-marin autonome peut se propulser efficacement en utilisant l’énergie des courants d’eau environnants. Les véhicules sous-marins et aériens doivent se frayer un chemin dans un environnement complexe de rafales et de courants, luttant contre de nombreux flux tout en essayant de garder le cap.
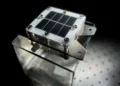
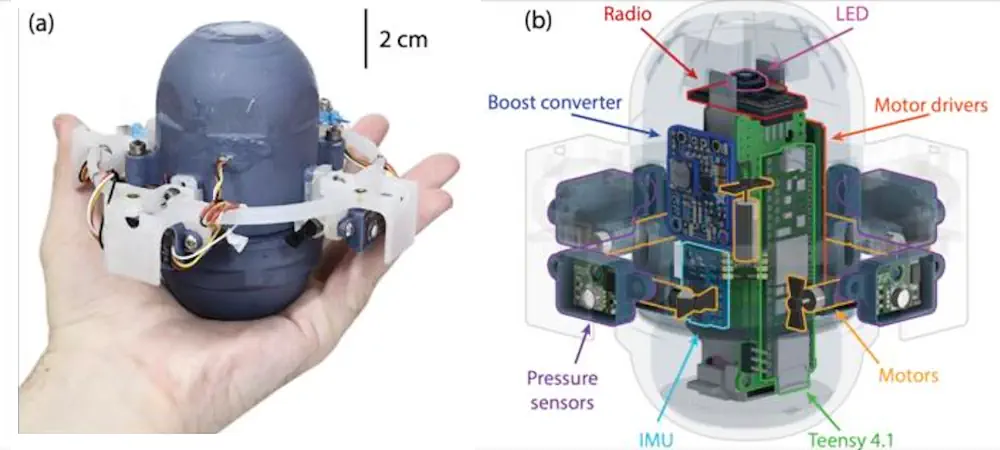
Peter Gunnarson et John O. Dabiri ont conçu un robot sous-marin qui utilise ces courants pour réduire l’énergie nécessaire à son déplacement, en « surfant » sur les tourbillons pour arriver à destination. Le robot de la taille d’une paume, CARL, est équipé d’une unité de mesure inertielle embarquée, de dix moteurs permettant de se déplacer sur les trois axes et d’un algorithme simple mais efficace : si l’amplitude de l’accélération dans la direction du flux transversal dépasse un certain seuil, CARL nage dans la même direction que l’accélération. Le robot a été testé dans un réservoir de 1,5 m de profondeur et de 5 m de long, dans lequel des anneaux de vortex ont été générés par l’impulsion d’un propulseur fixé au mur.
Grâce à l’algorithme, CARL a pu surfer sur le vortex d’un bout à l’autre de la cuve en utilisant un cinquième de l’énergie d’un robot n’ayant pas la même programmation. Selon les auteurs, le succès de CARL à surfer sur une structure d’écoulement prototypique suggère qu’avec une élaboration plus poussée, une technique similaire pourrait être utilisée pour permettre aux véhicules autonomes d’améliorer leur efficacité de manière significative en interagissant avec les écoulements d’arrière-plan.

Source Caltech
Article : « Surfing vortex rings for energy-efficient propulsion » – DOI : 10.1093/pnasnexus/pgaf031