Cecilia Huertas Cerdeira, qui a grandi en Espagne, a été captivée par les mouvements élégants de la vie aquatique lors de ses fréquentes vacances sur la côte atlantique. Plus tard, alors qu’elle était doctorante à l’Institut de technologie de Californie, elle a dirigé sa planche de surf vers les vagues du Pacifique.
Aujourd’hui professeur adjoint d’ingénierie mécanique à l’université du Maryland, elle conserve cet intérêt pour l’océan lorsqu’elle travaille à l’amélioration des drones sous-marins, qui ont progressé ces dernières années mais n’ont pas la vitesse et l’agilité de leurs cousins aériens. Huertas Cerdeira a l’intention de les aider à rattraper leur retard.
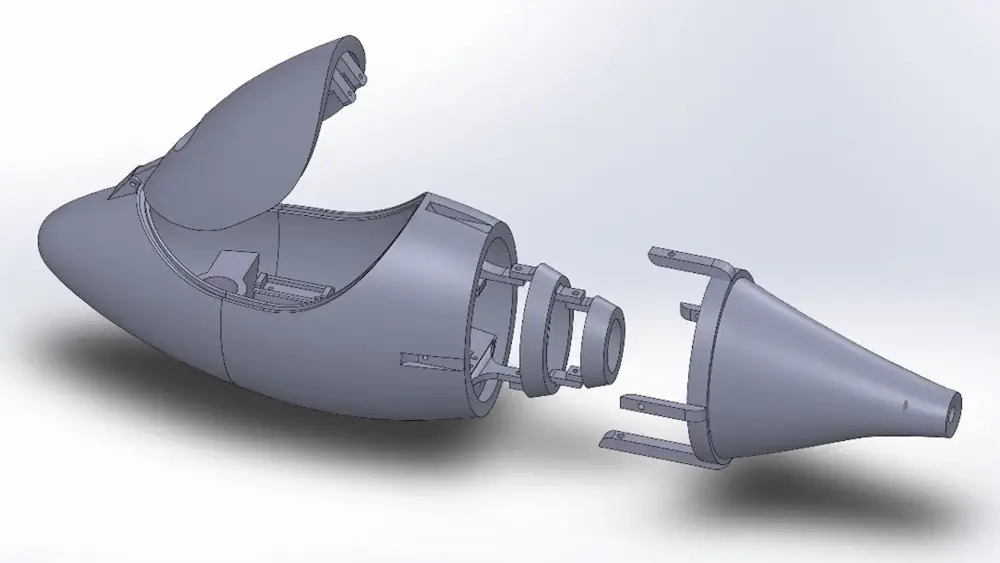
Elle a lancé un projet de construction d’un véhicule sous-marin sans pilote (UUV) propulsé par une nageoire robotique. Inspirée de la nageoire arrière d’un thon, la réplique propulsera le drone en eaux profondes avec plus de rapidité et de maniabilité que les versions actuelles.
« Je m’inspire des nageurs biologiques qui ont évolué pendant des millions d’années et qui peuvent se déplacer plus efficacement que tout ce qui est équipé d’une hélice rotative », indique Huertas Cerdeira. « Nous ne pouvons pas construire un poisson. Mais nous pouvons construire un robot qui se déplace comme un poisson et l’optimiser ».
Financé par une subvention de la National Science Foundation accordée en décembre, le projet est basé sur un article de recherche rédigé par Huertas Cerdeira et récemment publié dans Scientific Reports. (Un autre de ses projets de drone, visant à développer un système de récolte d’énergie embarqué pour les aéronefs sans pilote d’observation de la terre de longue durée, a bénéficié d’une bourse de projet individuel UMD Grand Challenges).
Son équipe de recherche a pour objectif de construire l’aileron et de le tester dans un tunnel d’eau au laboratoire d’hydrodynamique de l’UMD d’ici la fin de l’année. Une fois le drone achevé, si possible dans deux ou trois ans, ils effectueront des tests au laboratoire d’innovation et d’expérimentation des technologies autonomes du Maryland, dans le sud de l’État.
Les recherches de Huertas Cerdeira s’inscrivent dans le contexte d’une dépendance mondiale croissante à l’égard des UUV pour des tâches qui seraient trop coûteuses ou trop dangereuses pour les équipages de sous-marins. Les drones sous-marins sont moins chers à construire et à utiliser, et ils se faufilent dans les recoins aquatiques de manière unique, photographiant les fuites de conduites de pétrole, mesurant les températures des plateaux de glace polaire, nettoyant les déchets, étudiant la vie marine et effectuant des tâches militaires telles que le déminage.
Mais souvent, leurs voyages ne sont ni fluides ni rapides. Les propulseurs des UUV conventionnels dépassent latéralement, réduisant l’espace disponible et augmentant la traînée, tandis que le ronronnement des moteurs peut effrayer les poissons ou compromettre la couverture des militaires furtifs.
drone sous-marin.
« Les drones aériens ont une dizaine d’années d’avance sur leurs homologues maritimes », explique Rob Nicholson, officier océanographe de la réserve navale et scientifique affilié à l’université du Delaware, spécialisé dans ce que l’on appelle communément les “technologies bleues”. Le ministère de la défense et l’industrie pétrolière et gazière ont été les premiers à investir dans les UUV, mais « à mesure que les développeurs commerciaux continueront d’innover, ils se tourneront de plus en plus vers le monde universitaire, où de nombreuses nouvelles percées peuvent se produire ».
Les ailerons de poisson sont silencieux et aérodynamiques, et Mme Huertas Cerdeira est convaincue qu’une version mécanique conservera les mêmes performances. Experte en mécanique des fluides, elle étudie la façon dont les objets se plient et se déplacent dans l’air ou dans l’eau. Au début de sa carrière, elle s’est concentrée sur les éoliennes avant de s’intéresser aux drones traditionnels et, plus récemment, aux UUV.
Ses travaux lui ont permis d’apprendre que les poissons sont devenus des maîtres nageurs en redistribuant la rigidité de leurs nageoires tout en luttant contre les forces de l’eau. En battant des ailes, leurs nageoires changent continuellement de forme, s’assouplissant à un endroit et se raidissant à un autre, faisant preuve d’une fluidité qui ne ressemble guère à des hélices passives et bidimensionnelles.
Compte tenu des contraintes des drones sous-marins modernes, Huertas Cerdeira s’est demandé si elle pouvait en équiper un avec une nageoire robotisée imitant la répartition de la rigidité utilisée par les thons lorsqu’ils nagent. L’équipe y parviendrait en équipant la nageoire de plusieurs cavités qu’elle pourrait remplir d’air sous pression, puis vider, imitant ainsi la dynamique d’un poisson.
« Il y a beaucoup de solutions très intéressantes que la nature a trouvées et auxquelles nous ne pensons pas toujours en tant qu’ingénieurs », a-t-elle déclaré.
Dans l’ensemble, elle espère que ces travaux serviront de base aux futurs UUV bio-inspirés et encourageront les explorations aquatiques dans le monde entier. « Des systèmes de propulsion améliorés peuvent contribuer à faire passer nos activités sous-marines au niveau supérieur », a-t-elle déclaré.
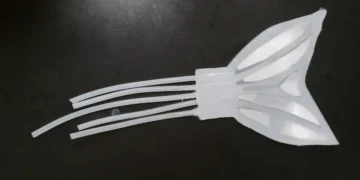
Légende illustration : Un prototype de nageoire robotique souple construit par l’équipe d’un chercheur de l’UMD peut modifier la répartition de sa rigidité au fur et à mesure que le drone sous-marin nage, améliorant ainsi ses performances. crédit : Shirah Abrishamian
Article : « A 3-DOF caudal fin for precise maneuvering of thunniform-inspired unmanned underwater vehicles » – DOI : s41598-024-67798-w